1. Introduction本文是读GFS论文的总结,收录在我的github中papers项目,papers项目旨在学习和总结分布式系统相关的论文。
全文主要分为以下几方面:
- Design Motivation
- Architecture
- System Interactions
- Master Operation
- Fault Tolerance and Diagnose
- Discussion
2. Design Motivation
google对现有系统的运行状态以及应用系统进行总结,抽象出对文件系统的需求,主要分为以下几个方面。
- 普通商用的机器硬件发生故障是常态
- 存储的问题普遍比较大,几个G的文件很常见
- 大部分的文件操作都是在追加数据,覆盖原来写入的数据的情况比较少见,随机写几乎不存在
- 读操作主要包括两种,large streaming read和small random read
- 为了应用使用方便,多客户端并行地追加同一个文件需要非常高效
- 带宽的重要性大于时延,目标应用是高速读大块数据的应用,对响应时间没有过多的需求
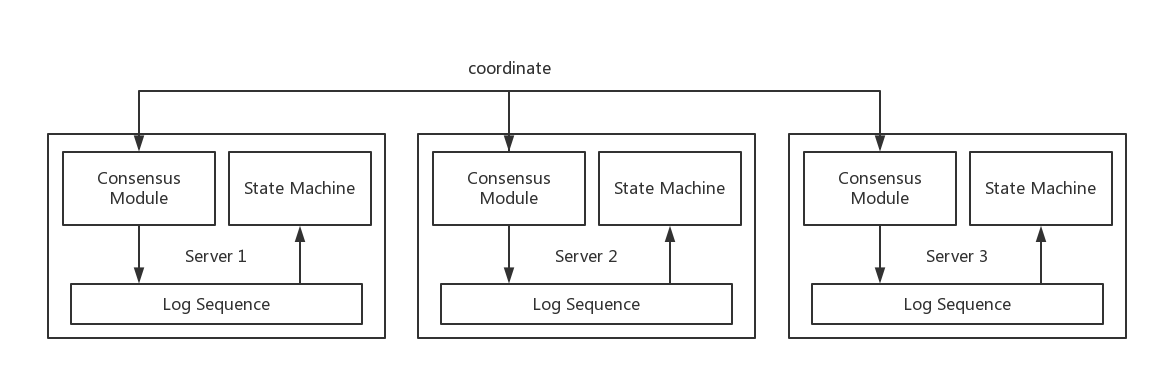
3. Architecture
本部分讨论gfs的总体架构,以及在此架构上需要考虑的一些问题。
3.1 Overview
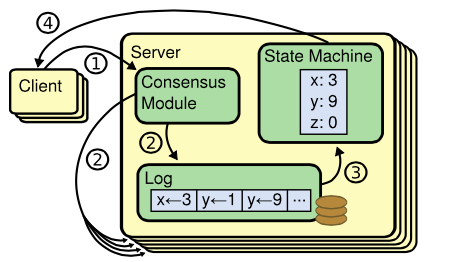
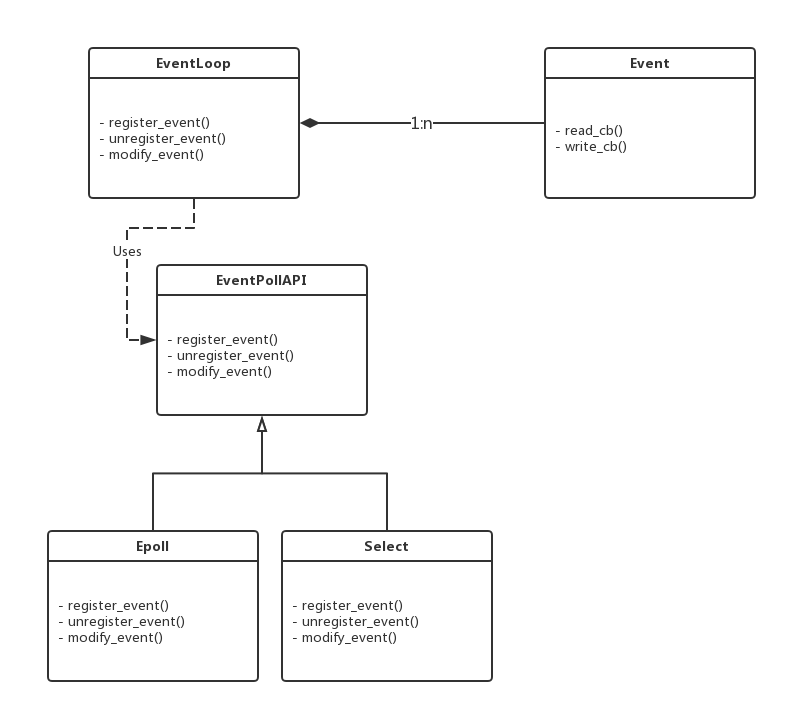
GFS的整体架构如下图:
(图片来源:gfs论文)
GFS中有四类角色,分别是
- GFS chunkserver
- GFS master
- GFS client
- Application
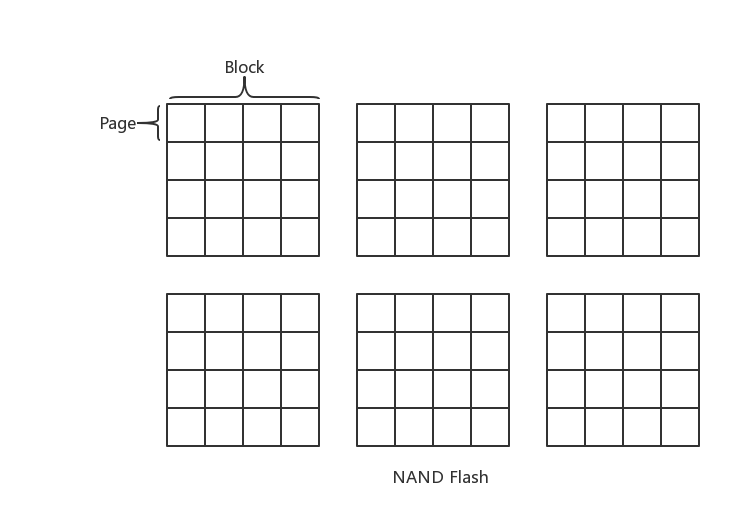
3.1.1 GFS chunkserver
在GFS chunkserver中,文件都是分成固定大小的chunk来存储的,每个chunk通过全局唯一的64位的chunk handle来标识,chunk handle在chunk创建的时候由GFS master分配。GFS chunkserver把文件存储在本地磁盘中,读或写的时候需要指定文件名和字节范围,然后定位到对应的chunk。为了保证数据的可靠性,一个chunk一般会在多台GFS chunkserver上存储,默认为3份,但用户也可以根据自己的需要修改这个值。
3.1.2 GFS master
GFS master管理所有的元数据信息,包括namespaces,访问控制信息,文件到chunk的映射信息,以及chunk的地址信息(即chunk存放在哪台GFS chunkserver上)。
3.1.3 GFS client
GFS client是GFS应用端使用的API接口,client和GFS master交互来获取元数据信息,但是所有和数据相关的信息都是直接和GFS chunkserver来交互的。
3.1.4 Application
Application为使用gfs的应用,应用通过GFS client于gfs后端(GFS master和GFS chunkserver)打交道。
3.2 Single Master
GFS架构中只有单个GFS master,这种架构的好处是设计和实现简单,例如,实现负载均衡时可以利用master上存储的全局的信息来做决策。但是,在这种架构下,要避免的一个问题是,应用读和写请求时,要弱化GFS master的参与度,防止它成为整个系统架构中的瓶颈。
从一个请求的流程来讨论上面的问题。首先,应用把文件名和偏移量信息传递给GFS client,GFS client转换成(文件名,chunk index)信息传递给GFS master,GFS master把(chunk handle, chunk位置信息)返回给客户端,客户端会把这个信息缓存起来,这样,下次再读这个chunk的时候,就不需要去GFS master拉取chunk位置信息了。
另一方面,GFS支持在一个请求中同时读取多个chunk的位置信息,这样更进一步的减少了GFS client和GFS master的交互次数,避免GFS master成为整个系统的瓶颈。
3.3 Chunk Size
对于GFS来说,chunk size的默认大小是64MB,比一般文件系统的要大。
优点
- 可以减少GFS client和GFS master的交互次数,chunk size比较大的时候,多次读可能是一块chunk的数据,这样,可以减少GFS client向GFS master请求chunk位置信息的请求次数。
- 对于同一个chunk,GFS client可以和GFS chunkserver之间保持持久连接,提升读的性能。
- chunk size越大,chunk的metadata的总大小就越小,使得chunk相关的metadata可以存储在GFS master的内存中。
缺点
- chunk size越大时,可能对部分文件来讲只有1个chunk,那么这个时候对该文件的读写就会落到一个GFS chunkserver上,成为热点。
对于热点问题,google给出的解决方案是应用层避免高频地同时读写同一个chunk。还提出了一个可能的解决方案是,GFS client找其他的GFS client来读数据。
64MB应该是google得出的一个比较好的权衡优缺点的经验值。
GFS master存储三种metadata,包括文件和chunk namespace,文件到chunk的映射以及chunk的位置信息。这些metadata都是存储在GFS master的内存中的。对于前两种metadata,还会通过记操作日志的方式持久化存储,操作日志会同步到包括GFS master在内的多台机器上。GFS master不持久化存储chunk的位置信息,每次GFS master重启或者有新的GFS chunkserver加入时,GFS master会要求对应GFS chunkserver把chunk的位置信息汇报给它。
3.4.1 In-Memory Data Structures
使用内存存储metadata的好处是读取metadata速度快,方便GFS master做一些全局扫描metadata相关信息的操作,例如负载均衡等。
但是,以内存存储的的话,需要考虑的是GFS master的内存空间大小是不是整个系统能存储的chunk数量的瓶颈所在。在GFS实际使用过程中,这一般不会成为限制所在,因为GFS中一个64MBchunk的metadata大小不超过64B,并且,对于大部分chunk来讲都是使用的全部的空间的,只有文件的最后一个chunk会存储在部分空间没有使用,因此,GFS master的内存空间在实际上很少会成为限制系统容量的因素。即使真的是现有的存储文件的chunk数量超过了GFS master内存空间大小的限制,也可以通过加内存的方式,来获取内存存储设计带来的性能、可靠性等多种好处。
3.4.2 Chunk Locations
GFS master不持久化存储chunk位置信息的原因是,GFS chunkserver很容易出现宕机,重启等行为,这样GFS master在每次发生这些事件的时候,都要修改持久化存储里面的位置信息的数据。
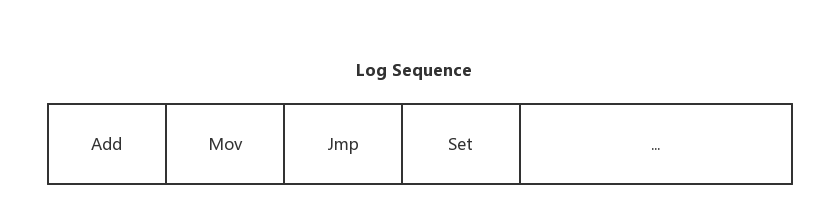
3.4.3 Operation Log
operation log的作用
- 持久化存储metadata
- 它的存储顺序定义了并行的操作的最终的操作顺序
怎么存
operation log会存储在GFS master和多台远程机器上,只有当operation log在GFS master和多台远程机器都写入成功后,GFS master才会向GFS client返回成功。为了减少operation log在多台机器落盘对吞吐量的影响,可以将一批的operation log形成一个请求,然后写入到GFS master和其他远程机器上。
check point
当operation log达到一定大小时,GFS master会做checkpoint,相当于把内存的B-Tree格式的信息dump到磁盘中。当master需要重启时,可以读最近一次的checkpoint,然后replay它之后的operation log,加快恢复的时间。
做checkpoint的时候,GFS master会先切换到新的operation log,然后开新线程做checkpoint,所以,对新来的请求是基本是不会有影响的。
4. System Interactions
本部分讨论GFS的系统交互流程。
4.1 Leases and Mutation Order
GFS master对后续的数据流程是不做控制的,所以,需要一个机制来保证,所有副本是按照同样的操作顺序写入对应的数据的。GFS采用lease方式来解决这个问题,GFS对一个chunk会选择一个GFS chunkserver,发放lease,称作primary,由primary chunkserver来控制写入的顺序。
Lease的过期时间默认是60s,可以通过心跳信息来续时间,如果一个primary chunkserver是正常状态的话,这个时间一般是无限续下去的。当primary chunkserver和GFS master心跳断了后,GFS master也可以方便的把其他chunk副本所在的chunkserver设置成primary。
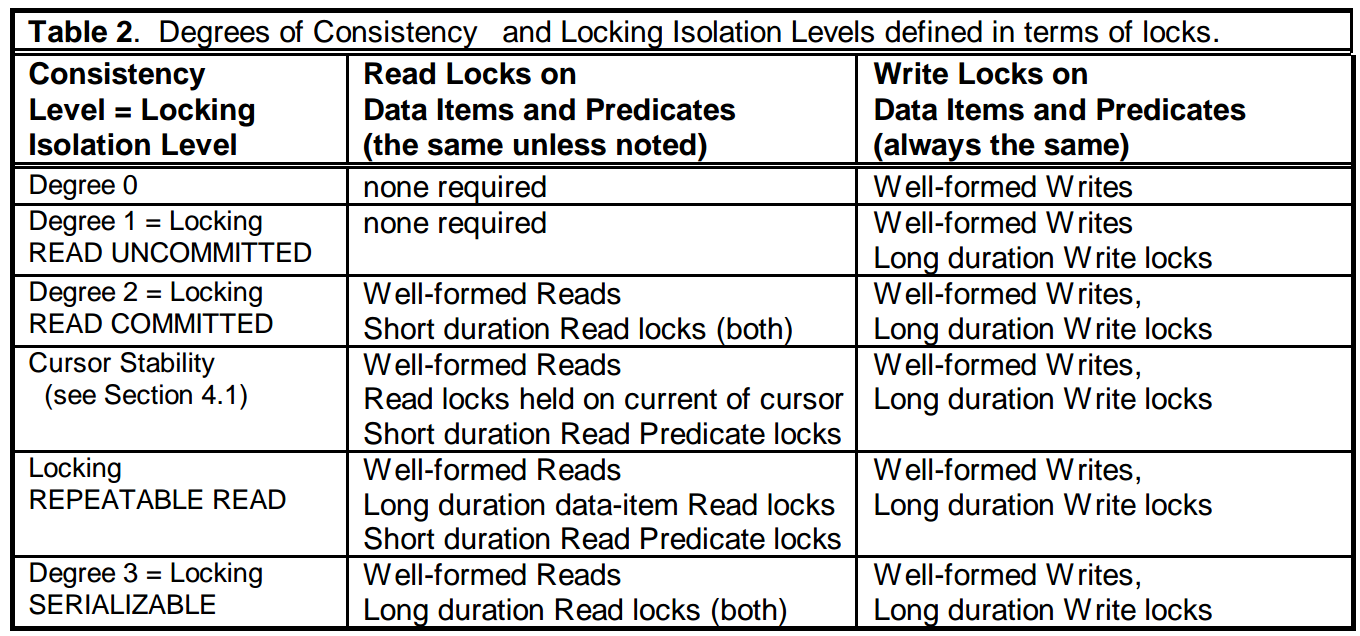
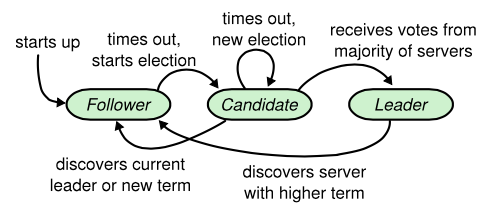
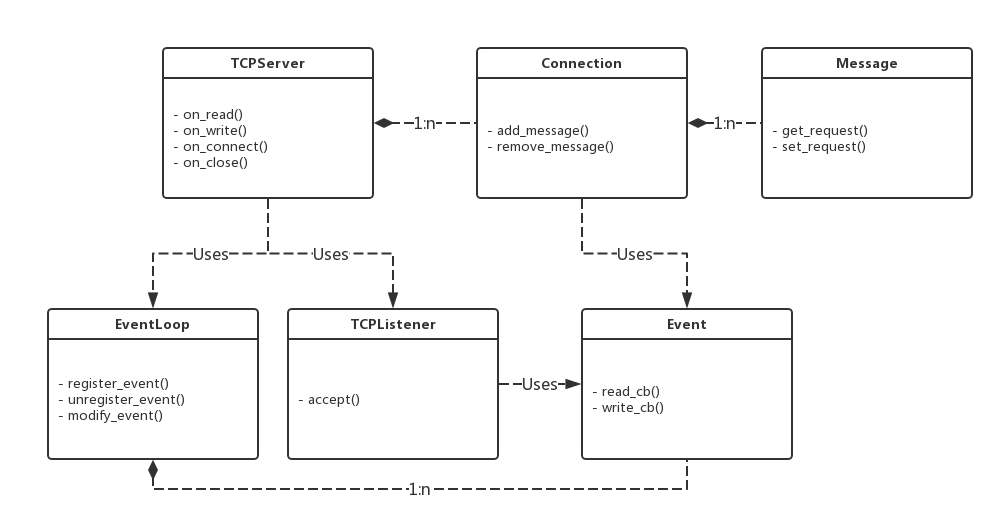
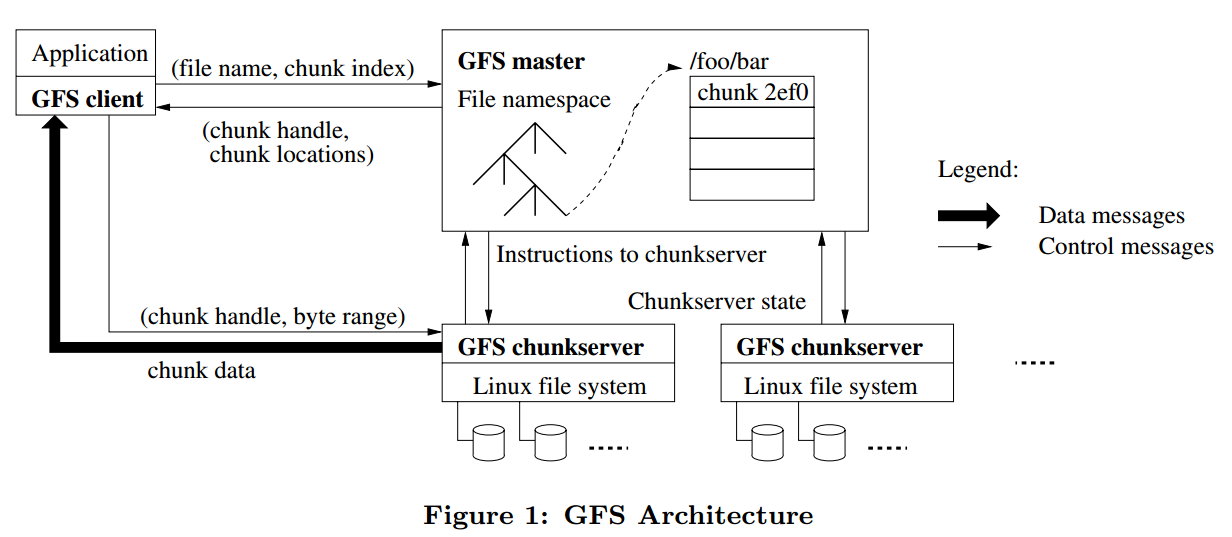
4.1.1 Write Control and Data Flow
(图片来源:gfs论文)
- GFS client向GFS master请求拥有具有当前chunk的lease的chunkserver信息,以及chunk的其他副本所在的chunkserver的信息,如果当前chunk没有lease,GFS master会分配一个。
- GFS master把primary chunkserver以及其他副本的chunkserver信息返回给client。client会缓存这些信息,只有当primary chunkserver连不上或者lease发生改变后,才需要再向GFS master获取对应的信息。
- client把数据推送给所有包含此chunk的chunkserver,chunkserver收到后会先把数据放到内部的LRU buffer中,当数据被使用或者过期了,才删除掉。注意,这里没有将具体怎么来发送数据,会在下面的Data Flow讲。
- 当所有包含chunk副本的chunkserver都收到了数据,client会给primary发送一个写请求,包含之前写的数据的信息,primary会分配对应的序号给此次的写请求,这样可以保证从多个客户端的并发写请求会得到唯一的操作顺序,保证多个副本的写入数据的顺序是一致的。
- primary转发写请求给所有其他的副本所在的chunkserver(Secondary replica),操作顺序由primary指定。
- Secondary replica写成功后会返回给primary replica。
- Primary replica返回给client。任何副本发生任何错误都会返回给client。
这里,写数据如果发生错误可能会产生不一致的情况,会在consistency model中讨论。
4.2 Data Flow
4.1中第三步的Data Flow采用的是pipe line方式,目标是为了充分利用每台机器的网络带宽。假设一台机器总共有三个副本S1-S3。整个的Data Flow为:
- client选择离它最近的chunkserver S1,开始推送数据
- 当chunkserver S1收到数据后,它会立马转发到离它最近的chunkserver S2
- chunkserver S2收到数据后,会立马转发给离它最近的chunkserver S3
不断重复上述流程,直到所有的chunkserver都收到client的所有数据。
以上述方式来传送B字节数据到R个副本,并假设网络吞吐量为T,机器之间的时延为L,那么,整个数据的传输时间为B/T+RL。
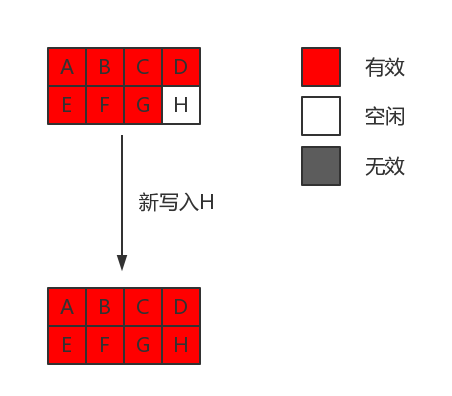
4.3 Atomic Record Appends
Append操作流程和写差不多,主要区别在以下
- client把数据推送到所有副本的最后一个chunk,然后发送写请求到primary
- primary首先检查最后一个chunk的剩余空间是否可以满足当前写请求,如果可以,那么执行写流程,否则,它会把当前的chunk的剩余空间pad起来,然后告诉其他的副本也这么干,最后告诉client这个chunk满了,写入下个chunk。
这里需要讨论的是,如果append操作在部分副本失败的情况下,会发生什么?
例如,写操作要追加到S1-S3,但是,仅仅是S1,S2成功了,S3失败了,GFS client会重试操作,假如第二次成功了,那么S1,S2写了两次,S3写了一次,目前的理解是GFS会先把失败的记录进行padding对齐到primary的记录,然后再继续append。
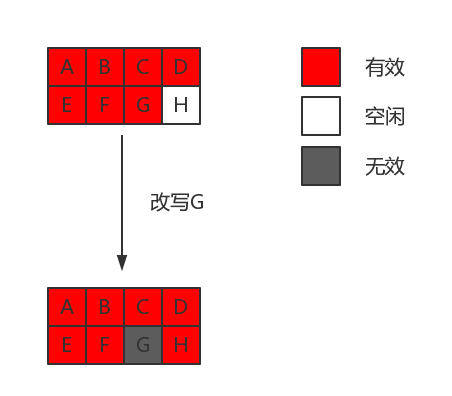
4.4 Snapshot
Snapshot的整个流程如下:
- client向GFS master发送Snapshot请求
- GFS master收到请求后,会回收所有这次Snapshot涉及到的chunk的lease
- 当所有回收的lease到期后,GFS master写入一条日志,记录这个信息。然后,GFS会在内存中复制一份snapshot涉及到的metadata
当snapshot操作完成后,client写snapshot中涉及到的chunk C的流程如下:
- client向GFS master请求primary chunkserver和其他chunkserver
- GFS master发现chunk C的引用计数超过1,即snapshot和本身。它会向所有有chunk C副本的chunkserver发送创建一个chunk C的拷贝请求,记作是chunk C’,这样,把最新数据写入到chunk C’即可。本质上是copy on write。
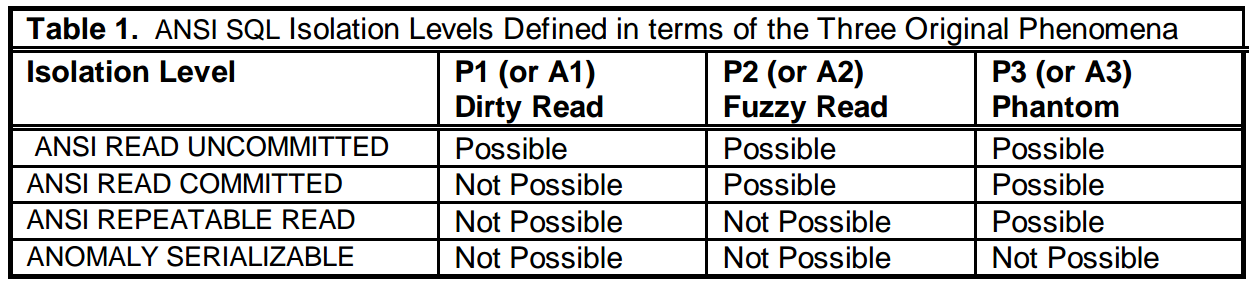
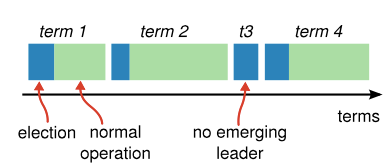
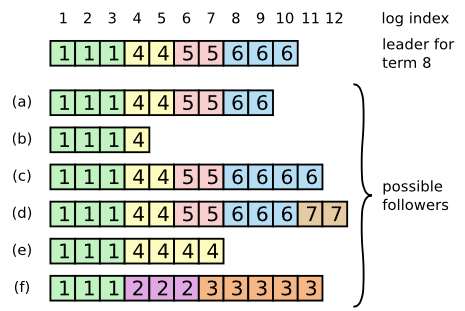
4.5 Consistency Model
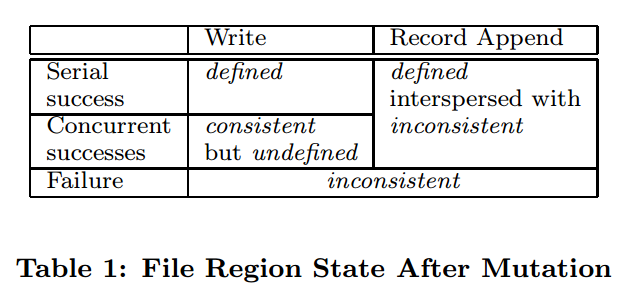
(图片来源:gfs论文)
GFS中consistent、defined的定义如下:
- consistent:所有的客户端都能看到一样的数据,不管它们从哪个副本读取
- defined:当一个文件区域发生操作后,client可以看到刚刚操作的所有数据,那么说这次操作是defined。
下面分析表格中出现的几种情况。
- Write(Serial Success),单个写操作,并且返回成功,那么所有副本都写入了这次操作的数据,因此所有客户端都能看到这次写入的数据,所以,是defined。
- Write(Concurrent Successes),多个写操作,并且返回成功,由于多个客户端写请求发送给priamary后,由primary来决定写的操作顺序,但是,有可能多个写操作可能是有区域重叠的,这样,最终写完成的数据可能是多个写操作数据叠加在一起,所以这种情况是consistent和undefined。
- Write(Failure),写操作失败,则可能有的副本写入了数据,有的没有,所以是inconsistent。
- Record Append(Serial Success and Concurrent Success),由于Record Append可能包含重复数据,因此,是inconsistent,由于整个写入的数据都能看到,所以是defined。
- Record Append(Failure),可能部分副本append成功,部分副本append失败,所以,结果是inconsistent。
GFS用version来标记一个chunkserver挂掉的期间,是否有client进行了write或者append操作。每进行一次write或者append,version会增加。
需要考虑的点是client会缓存chunk的位置信息,有可能其中某些chunkserver已经挂掉又起来了,这个时候chunkserver的数据可能是老的数据,读到的数据是会不一致的。读流程中,好像没有看到要带version信息来读的。这个论文中没看到避免的措施,目前还没有结果。
4.5.1 Implications for Applications
应用层需要采用的机制:用append而不是write,做checkpoint,writing self-validating和self-identifying records。具体地,如下:
- 应用的使用流程是append一个文件,到最终写完后,重命名文件
- 对文件做checkpoint,这样应用只需要关注上次checkpoint时的文件区域到最新文件区域的数据是否是consistent的,如果这期间发生不一致,可以重新做这些操作。
- 对于并行做append的操作,可能会出现重复的数据,GFS client提供去重的功能。
5. Master Operation
GFS master的功能包括,namespace Management, Replica Placement,Chunk Creation,Re-replication and Rebalancing以及Garbage Collection。
5.1 Namespace Management and Locking
每个master操作都需要获得一系列的锁。如果一个操作涉及到/d1/d2/…/dn/leaf,那么需要获得/d1,/d1/d2,/d1/d2/…/dn的读锁,然后,根据操作类型,获得/d1/d2/…/dn/leaf的读锁或者写锁,其中leaf可能是文件或者路径。
一个例子,当/home/user被快照到/save/user的时候,/home/user/foo的创建是被禁止的。
对于快照,需要获得/home和/save的读锁,/home/user和/save/user的写锁。对于创建操作,会获得/home,/home/user的读锁,然后/home/user/foo的写锁。其中,/home/user的锁产生冲突,/home/user/foo创建会被禁止。
这种加锁机制的好处是对于同一个目录下,可以并行的操作文件,例如,同一个目录下并行的创建文件。
5.2 Replica Placement
GFS的Replica Placement的两个目标:最大化数据可靠性和可用性,最大化网络带宽的使用率。因此,把每个chunk的副本分散在不同的机架上,这样一方面,可以抵御机架级的故障,另一方面,可以把读写数据的带宽分配在机架级,重复利用多个机架的带宽。
5.3 Creation, Re-replication, Rebalancing
5.3.1 Chunk Creation
GFS在创建chunk的时候,选择chunkserver时考虑的因素包括:
- 磁盘空间使用率低于平均值的chunkserver
- 限制每台chunkserver的最近的创建chunk的次数,因为创建chunk往往意味着后续需要写大量数据,所以,应该把写流量尽量均摊到每台chunkserver上
- chunk的副本放在处于不同机架的chunkserver上
5.3.2 Chunk Re-replication
当一个chunk的副本数量少于预设定的数量时,需要做复制的操作,例如,chunkserver宕机,副本数据出错,磁盘损坏,或者设定的副本数量增加。
chunk的复制的优先级是按照下面的因素来确定的:
- 丢失两个副本的chunk比丢失一个副本的chunk的复制认为优先级高
- 文件正在使用比文件已被删除的chunk的优先级高
- 阻塞了client进程的chunk的优先级高(这个靠什么方法得到?)
chunk复制的时候,选择新chunkserver要考虑的点:
- 磁盘使用率
- 单个chunkserver的复制个数限制
- 多个副本需要在多个机架
- 集群的复制个数限制
- 限制每个chunkserver的复制网络带宽,通过限制读流量的速率来限制
5.3.3 Rebalancing
周期性地检查副本分布情况,然后调整到更好的磁盘使用情况和负载均衡。GFS master对于新加入的chunkserver,逐渐地迁移副本到上面,防止新chunkserver带宽打满。
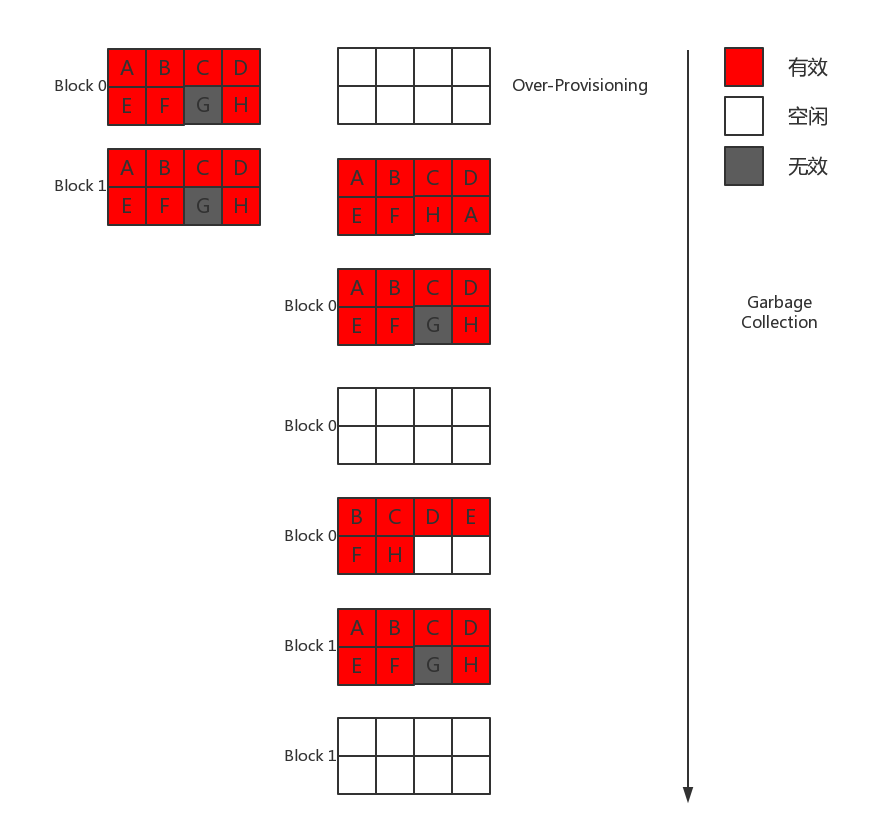
5.4 Garbage Collection
在GFS删除一个文件后,并不会马上就对文件物理删除,而是在后面的定期清理的过程中才真正的删除。
具体地,对于一个删除操作,GFS仅仅是写一条日志记录,然后把文件命名成一个对外部不可见的名称,这个名称会包含删除的时间戳。GFS master会定期的扫描,当这些文件存在超过3天后,这些文件会从namespace中删掉,并且内存的中metadata会被删除。
在对chunk namespace的定期扫描时,会扫描到这些文件已经被删除的chunk,然后会把metadata从磁盘中删除。
在与chunkserver的heartbeat的交互过程中,GFS master会把不在metadata中的chunk告诉chunkserver,然后chunkserver就可以删除这些chunk了。
采用这种方式删除的好处:
- 利用心跳方式交互,在一次删除失败后,还可以通过下次心跳继续重试操作
- 删除操作和其他的全局扫描metadata的操作可以放到一起做
坏处:
- 有可能有的应用需要频繁的创建和删除文件,这种延期删除方式会导致磁盘使用率偏高,GFS提供的解决方案是,对一个文件调用删除操作两次,GFS会马上做物理删除操作,释放空间。
5.5 Stale Replication Detection
当一台chunkserver挂掉的时候,有新的写入操作到chunk副本,会导致chunkserve的数据不是最新的。
当master分配lease到一个chunk时,它会更新chunk version number,然后其他的副本都会更新该值。这个操作是在返回给客户端之前完成的,如果有一个chunkserver当前是宕机的,那么它的version number就不会增加。当chunkserver重启后,会汇报它的chunk以及version number,对于version number落后的chunk,master就认为这个chunk的数据是落后的。
GFS master会把落后的chunk当垃圾来清理掉,并且不会把落后的chunkserver的位置信息传给client。
备注:
1. GFS master把落后的chunk当作垃圾清理,那么,是否是走re-replication的逻辑来生成新的副本呢?没有,是走立即复制的逻辑。
6. Fault Tolerance and Diagnose
6.1 High Availability
为了实现高可用性,GFS在通过两方面来解决,一是fast recovery,二是replication
6.1.1 Fast Recovery
master和chunkserver都被设计成都能在秒级别重启
6.1.2 Chunk Replications
每个chunk在多个机架上有副本,副本数量由用户来指定。当chunkserver不可用时,GFS master会自动的复制副本,保证副本数量和用户指定的一致。
6.1.3 Master Replication
master的operation log和checkpoint都会复制到多台机器上,要保证这些机器的写都成功了,才认为是成功。只有一台master在来做garbage collection等后台操作。当master挂掉后,它能在很多时间内重启;当master所在的机器挂掉后,监控会在其他具有operation log的机器上重启启动master。
新启动的master只提供读服务,因为可能在挂掉的一瞬间,有些日志记录到primary master上,而没有记录到secondary master上(这里GFS没有具体说同步的流程)。
6.2 Data Integrity
每个chunkserver都会通过checksum来验证数据是否损坏的。
每个chunk被分成多个64KB的block,每个block有32位的checksum,checksum在内存中和磁盘的log中都有记录。
对于读请求,chunkserver会检查读操作所涉及block的所有checksum值是否正确,如果有一个block的checksum不对,那么会报错给client和master。client这时会从其他副本读数据,而master会clone一个新副本,当新副本clone好后,master会删除掉这个checksum出错的副本。
主要是通过log,包括重要事件的log(chunkserver上下线),RPC请求,RPC响应等。
7. Discussion
本部分主要讨论大规模分布式系统一书上,列出的关于gfs的一些问题,具体如下。
7.1 为什么存储三个副本?而不是两个或者四个?
- 如果存储的是两个副本,挂掉一个副本后,系统的可用性会比较低,例如,如果另一个没有挂掉的副本出现网络问题等,整个系统就不可用了
- 如果存储的是四个副本,成本比较高
7.2 chunk的大小为何选择64MB?这个选择主要基于哪些考虑?
优点
- 可以减少GFS client和GFS master的交互次数,chunk size比较大的时候,多次读可能是一块chunk的数据,这样,可以减少GFS client向GFS master请求chunk位置信息的请求次数。
- 对于同一个chunk,GFS client可以和GFS chunkserver之间保持持久连接,提升读的性能。
- chunk size越大,chunk的metadata的总大小就越小,使得chunk相关的metadata可以存储在GFS master的内存中。
缺点
- chunk size越大时,可能对部分文件来讲只有1个chunk,那么这个时候对该文件的读写就会落到一个GFS chunkserver上,成为热点。
64MB应该是google得出的一个比较好的权衡优缺点的经验值。
7.3 gfs主要支持追加,改写操作比较少,为什么这么设计?如何设计一个仅支持追加操作的文件系统来构建分布式表格系统bigtable?
- 因为追加多,改写少是google根据现有应用需求而确定的
- bigtable的问题等读到bigtable论文再讨论
7.4 为什么要将数据流和控制流分开?如果不分开,如何实现追加流程?
主要是为了更有效地利用网络带宽。把数据流分开,可以更好地优化数据流的网络带宽使用。
如果不分开,需要讨论下。
7.5 gfs有时会出现重复记录或者padding记录,为什么?
padding出现场景:
- last chunk的剩余空间不满足当前写入量大小,需要把last chunk做padding,然后告诉客户端写入下一个chunk
- append操作失败的时候,需要把之前写入失败的副本padding对齐到master
重复记录出现场景:
- append操作部分副本成功,部分失败,然后告诉客户端重试,客户端会在成功的副本上再次append,这样就会有重复记录出现
7.6 lease是什么?在gfs中起到了什么作用?它与心跳有何区别?
lease是gfs master把控制写入顺序的权限下放给chunkserver的机制,以减少gfs master在读写流程中的参与度,防止其成为系统瓶颈。心跳是gfs master检测chunkserver是否可用的标志。
7.7 gfs追加过程中如果出现备副本故障,如何处理?如果出现主副本故障,应该如何处理?
- 对于备副本故障,写入的时候会失败,然后primary会返回错误给client。按照一般的系统设计,client会重试一定次数,发现还是失败,这时候client会把情况告诉给gfs master,gfs master可以检测chunkserver的情况,然后把最新的chunkserver信息同步给client,client端再继续重试。
- 对于主副本故障,写入的时候会失败,client端应该是超时了。client端会继续重试一定次数,发现还是一直超时,那么把情况告诉给gfs master,gfs master发现primary挂掉,会重新grant lease到其他chunkserver,并把情况返回给client。
7.8 gfs master需要存储哪些信息?master的数据结构如何设计?
namespace、文件到chunk的映射以及chunk的位置信息
namespace采用的是B-Tree,对于名称采用前缀压缩的方法,节省空间;(文件名,chunk index)到chunk的映射,可以通过hashmap;chunk到chunk的位置信息,可以用multi_hashmap,因为是一对多的映射。
7.9 假设服务一千万个文件,每个文件1GB,master中存储元数据大概占多少内存?
1GB/64MB = 1024 / 64 = 16。总共需要16 * 10000000 * 64 B = 10GB
7.10 master如何实现高可用性?
- metadata中namespace,以及文件到chunk信息持久化,并存储到多台机器
- 对metadata的做checkpoint,保证重启后replay消耗时间比较短,checkpoint可以直接映射到内存使用,不用解析
- 在primary master发生故障的时候,并且无法重启时,会有外部监控将secondary master,并提供读服务。secondary master也会监控chunkserver的状态,然后把primary master的日志replay到内存中
7.11 负载的影响因素有哪些?如何计算一台机器的负载值?
主要是考虑CPU、内存、网络和I/O,但如何综合这些参数并计算还是得看具体的场景,每部分的权重随场景的不同而不同。
7.12 master新建chunk时如何选择chunkserver?如果新机器上线,负载值特别低,如何避免其他chunkserver同时往这台机器上迁移chunk?
如何选择chunkserver
- 磁盘空间使用率低于平均值的chunkserver
- 限制每台chunkserver最近创建chunk的次数,因为创建chunk往往意味着后续需要写入大量数据,所以,应该把写流量均摊到每台chunkserver
- chunk的副本放置于不同机架的chunkserver上
如何避免同时迁移
通过限制单个chunkserver的clone操作的个数,以及clone使用的带宽来限制,即从源chunkserver度数据的频率做控制。
7.13 如果chunkserver下线后过一会重新上线,gfs如何处理?
因为是过一会,所以假设chunk re-replication还没有执行,那么在这期间,可能这台chunkserver上有些chunk的数据已经处于落后状态了,client读数据的时候或者chunkserver定期扫描的时候会把这些状态告诉给master,master告诉上线后的chunkserver从其他机器复制该chunk,然后master会把这个chunk当作是垃圾清理掉。
对于没有落后的chunk副本,可以直接用于使用。
7.14 如何实现分布式文件系统的快照操作?
Snapshot的整个流程如下:
- client向GFS master发送Snapshot请求
- GFS master收到请求后,会回收所有这次Snapshot涉及到的chunk的lease
- 当所有回收的lease到期后,GFS master写入一条日志,记录这个信息。然后,GFS会在内存中复制一份snapshot涉及到的metadata
当snapshot操作完成后,client写snapshot中涉及到的chunk C的流程如下:
- client向GFS master请求primary chunkserver和其他chunkserver
- GFS master发现chunk C的引用计数超过1,即snapshot和本身。它会向所有有chunk C副本的chunkserver发送创建一个chunk C的拷贝请求,记作是chunk C’,这样,把最新数据写入到chunk C’即可。本质上是copy on write。
7.15 chunkserver数据结构如何设计?
chunkserver主要是存储64KB block的checksum信息,需要由chunk+offset,能够快速定位到checksum,可以用hashmap。
7.16 磁盘可能出现位翻转错误,chunkserver如何应对?
利用checksum机制,分读和写两种情况来讨论:
- 对于读,要检查所读的所有block的checksum值
- 对于写,分为append和write。对于append,不检查checksum,延迟到读的时候检查,因为append的时候,对于最后一个不完整的block计算checksum时候采用的是增量的计算,即使前面存在错误,也能在后来的读发现。对于overwrite,因为不能采用增量计算,要覆盖checksum,所以,必须要先检查只写入部分数据的checksum是否不一致,否则,数据错误会被隐藏。
7.17 chunkserver重启后可能有一些过期的chunk,master如何能够发现?
chunkserver重启后,会汇报chunk及其version number,master根据version number来判断是否过期。如果过期了,那么会做以下操作:
- 过期的chunk不参与数据读写流程
- master会告诉chunkserver从其他的最新副本里拷贝一份数据
- master将过期的chunk假如garbage collection中
问题:如果chunkserver拷贝数据的过程过程中,之前拷贝的数据备份又发生了变化,然后分为两种情况讨论:
- 如果期间lease没变,那么chunkserver不知道自己拷贝的数据是老的,应该会存在不一致的问题?
- 如果期间lease改变,那么chunkserver因为还不能提供读服务,那么version number应该不会递增,继续保持stable状态,然后再发起拷贝。
PS:
本博客更新会在第一时间推送到微信公众号,欢迎大家关注。

]]>